-- : --
Зарегистрировано — 120 530Зрителей: 63 875
Авторов: 56 655
On-line — 10379Зрителей: 2009
Авторов: 8370
Загружено работ — 2 076 849



СОЦИАЛЬНАЯ СЕТЬ ДЛЯ ТВОРЧЕСКИХ ЛЮДЕЙ
«Неизвестный Гений»
Циклоплан
Пред. |
Просмотр работы: |
След. |

Если бы созданные природой существа затрачивали на полет такую энергию, какую затрачивает современная авиация, их давно бы погубил естественный отбор. Вертолет с его наклонным ротором тратит львиную долю мощности только на преодоление силы тяжести, лишь остаточно выделяя часть реакции ротора на горизонтальную тягу. Добавить к этому дикое сопротивление, вызванное перекосом,- и портрет одного из самых нерациональных летательных аппаратов готов. У винтокрыла несущие винты находятся в авторотации, существенно экономя мощность, в полете затрачиваемую
только на горизонтальную тягу, поглощаемую главным образом их работой. Эту систему нельзя назвать вполне рациональной с конструктивной точки зрения ввиду наличия элементов, специально предназначенных только для создания подьемной силы (при том, что еще требуется специальный механизм привода,
подключаемого к ним при взлете/.
Вертолет имеет почти исключительно вредной силой так называемый реактивный момент - радиальную составляющую создаваемой лопастями силы, приводящую к вращению корпуса. На преодоление этого вредного эффекта во всех системах, кроме реактивного привода, затрачивается
дополнительная мощность, а в самой распространенной классической схеме еще и требуется специальный элемент - рулевой винт, фенестерон или реактивное сопло. Все это добавляет нерациональности данной системе.
Однако реактивный момент обнаруживает ряд полезных проявлений, нашедших применение при эксплуатации вертолетов. Симметричный боковой отброс воздуха радиальными потоками стабилизирует аппарат при двухвинтовой поперечной схеме. А в классической и продольной двухвинтовой изменение степени компенсации реактивного момента обеспечивает эффективное управление /возможен разворот на месте/ без наклона винтов.
Сама сила реактивного момента - на тяжелых вертолетах до нескольких тонн - сопоставима с тягой, требуемой для горизонтального движения. Разумеется, создать ей таковое не получается из-за ее циклической направленности.
У вертолета имеется устройство управления циклическим шагом, позволяющим координировать и дифференцировать создаваемую лопастями реакцию. Изменение циклического шага исплльзуется для путевого управления.
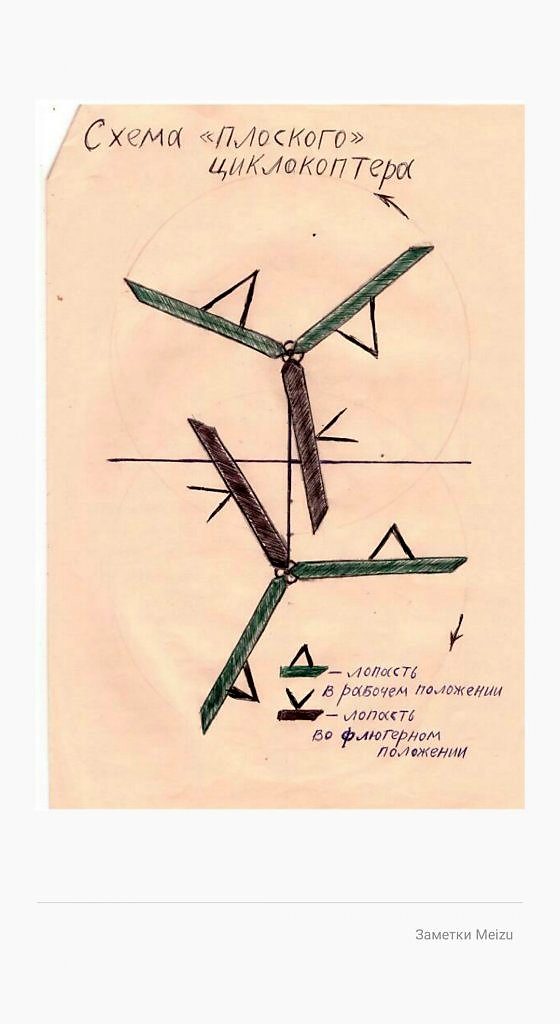
Если радиальную силу оставить действовать с одной стороны килевой линии, а с другой ее каким-то образом снять, то она будет действовать направленно - создаст линейно действующую пропульсивную силу/!/. Не забудем про возможность управления лопастями: чтобы лопасть вообще не создавала радиальной реакции, она должна быть поставлена в положение горизонтального флюгера - под нулевым углом атаки. Повернувшись на другую сторону диска, она восстановит рабочий угол атаки и создаст требуемую реакцию.
Созданная тяга в действительности будет направлена не прямо по килю, а по дуге, соответствующей траектории движения лопасти. Но коррекция направления - что называется, дело техники: рулевым устройством дуговому движению можно поставить заслон, и оно развернется в линейное. Линейное движение можно получить и из двух дуговых, действующих с противоположных сторон - тогда два параллельно расположенных ротора должны будут флюгировать лопасти на внутренних секторах и возвращать в рабочее положение на внешних.
Для управления описанным процессом может быть применено устройство, напоминающее автомат перекоса, но срабатывающее фиксировано по участкам движения лопастей.
Предложенный вариант ротора является по сути дела циклоидным пропеллером в горизонтальном варианте, представляющимся нам более целесообразным, чем уже известный и имеющий прецеденты реализации вертикальный /аппарат называется циклокоптером/. Горизонтальный вариант нам представляется более надежным и безопасным, и более удобным в применении: конструкция аппарата аналогична конструкции вертолета.
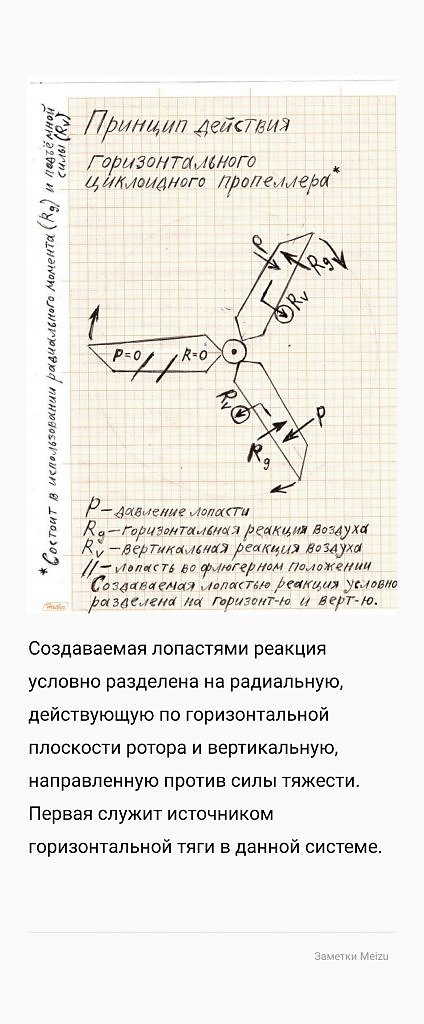
Лопасть горизонтального циклоидного пропеллера отличается от лопасти вертолетного винта, хотя и имеет понятное с ней сходство. Как и у вертолета, у циклоплана подъёмная сила создается непосредственной реакцией на лопастях по принципу крыльевой системы - разрежением воздуха на внешней стороне и уплотнением на внутренней. Но, в отличие от лопасти вертолетного винта, лопасть циклоплана ориентирована на создание как можно большей радиальной реакции, которая у вертолета расценивается как реактивный момент и для создания положительной движущей силы не используется.
Следующее принципиальное отличие горизонтального циклоидного пропеллера от вертолетного винта - это отсутствие эффекта цельного диска.- когда за счет вязкости воздуха отдельные лопасти сливаются в единую несущую плоскость. Если у циклоидного пропеллера реакция лопастей сольется в единую, то радиальные моменты потеряют свою выделенность и пропульсивная сила ими создаваться не будет/точнее сказать, будет с низкой эффективностью/. Поэтому число лопастей горизонтального циклоидного пропеллера ограничено прямым углом их взаимоположения на диске, обеспечивающим свободное расхождение создаваемых потоков;то есть предельное число лопастей ротора такой системы - 4.
Ширина лопастей ротора при фиксированном диаметре, то есть из ограниченной длине, может варьироваться, что известно по вертолетным винтам. У последних лопасти характеризуются малой относительной шириной/L/H~20/, что соответствует минимальному реактивному моменту и наилучшей управляемости лопасти. Увеличение ширины лопастей приводит как к усилению реактивного момента, так и увеличению подьемной силы;при этом затрудняется управление. У горизонтального циклоидного пропеллера важны в равной степени как подьемная сила, так и реактивный момент. Проблема управляемости преодолевается отличным от вертолетного характером движения лопасти по секторам: во внутренних они флюгируются, создавая своего рода аэродинамический вакуум, и принимают большой угол атаки на внешних. Рулевое устройство /или взаимоположение роторов/ должно обеспечивать симметрию возникающих при этом импульсов.
Итак, ротор циклоплана отличается от вертолетного большой шириной лопастей и ограниченным их числом. Являясь, кроме элемента создания подъемной силы, еще и пропульсивным движителем, в функции последнего он использует радиальную реакцию лопастей, аналогичную реактивному моменту у вертолета.
Чтобы радиальный момент имел уровень силы, достаточный для создания требуемой горизонтальной тяги, лопасти должны иметь ширину в 2, а то и в 3 раза больше, чем у вертолетных. Также их специфическая функция в горизонтальном циклоидном пропеллере требует большего угла установки, предел которого будет составлять 45 градусов /при большем угле увеличилась бы радиальная реакция, но до неприемлемого уровня снизилась бы подьемная сила/. Относительная длина лопасти скорее всего не будет превышать 10H,- угроза срыва потока преодолевается прямым положением ротора относительно горизонта /в отличие от накдоненного вперед вертолетного винта/. В плане несущей площади малое число лопастей компенсируется их большой шириной.
Оптимальная форма лопасти горизонтального циклоидного пропеллера - прямоугольная со скошенной концевой частью, - позволяет сохранить максимальную площадь при преодолении завихрений, создаваемых прямыми углами при вращении лопасти /неслучайно такая форма напоминает крыло птицы/.
Подъемная сила/вертикальная тяга/ для циклоидного пропеллера рассчитывается по теории скоростного напора для одной изолированной лопасти, так как их обьединяющее взаимодействие в нем исключено. Коэффициент эффективности при максимальном угле установки принимаем равным 1,5. Скорость движения лопасти, предназначенной специально для создания радиальной реакции, несколько ниже, чем в вертикальном роторе - ограничена значением в 200 м/с. Поскольку расчет делается для одной лопасти, значение Fn в формуле будет равно 1. Итак, 1,5*1кг/м3*0,5v2/2×Fn.Полученная по этой формуле величина, умноженная на число активных лопастей ротора, определяет только подьемную силу, так как радиальная реакция как раз вычитается из нее, предназначенной для обычного винта с вредным реактивным моментом.
В принципе плоскость, обращенная под углом в 45 градусов к горизонту, делит пополам направленную вниз /коаксиальную/ и радиальную /направленную горизонтально по кругу/ реакцию. Однако находящаяся над ротором воздушная масса непосредственно движется на него коаксиально, а радиальный момент ограничен угловым пространством диска. Поэтому горизонтальная тяга лопасти в такой системе рассчитывается по формуле реактивного момента для вертолетного винта с вводом соответствующих параметров горизонтального циклоидного пропеллера.
И все же с учетом того, что бОльшая часть реакции лопастей идет на создание подьемной силы, ЭФФЕКТИВНОСТЬ ГОРИЗОНТАЛЛЬНОГО ЦИКЛОИДНОГО ПРОПЕЛЛЕРА БУДЕТ ВыШЕ ЭФФЕКТИВНОСТИ ВЕРТОЛЕТНОГО ВИНТА: сила, вычитаемая как вредная из общей реакции последнего, здесь работает как полезная.
Может показаться, что широкая и под большим углом поднятая лопасть создаст сильное лобовое сопротивление. В действительности это не так: создающая радиальную реакцию лопасть горизонтального циклоидного пропеллера аэродинамически аналогична машущему крылу, у которого индуктивное сопротивление равно создаваемой тяге. В этом еще один момент преимущества перед наклоненным диском вертолетного винта, у которого силы тяги и индуктивного сопротивления /к которому добавляется еще волновое/ находятся в диспропорциональных отношениях. Работа лопастей циклоидного пропеллера не требует высокой скорости их движения /сравнима со скоростью полета аппарата/ и до волнового сопротивления их аэродинамика не доходит. Естественный характер обтекания этих элементов связан еще и с тем, что траектория их движения параллельна линии движения аппарата /диск циклоидного пропеллера для создания тяги не требует наклона/. А главный момент уменьшения сопротивления по сравнению с вертолетным винтом - отсутствие наступающих лопастей: здесь лопасти на обратном секторе находятся в положении горизонтального флюгера и реакции не создают.
С этим связан, конечно, и недостаток такой системы - работает только один сектор диска. Однако в скоростном полете деактивированные лопасти могут выполнять роль несущей поверхности, подобной жесткому крылу. При этом в положении висения будут работать одновременно все лопасти ротора, компенсируя недостающую динамическую поддержку /у вертолета такой компенсации нет, почему статический потолок значительно меньше динамического/.
Момент снижения КПД у описанного движителя создается кривизной вектора действия радиальной силы в активном секторе, обусловленной круговым характером движения лопасти, образующим в области используемой реакции полукруг - дуговую траекторию. На выпрямление действия движителя - подавление бокового коэффициента - при любом способе затрачивается некоторая энергия. Но, опять же ли, в отличие от вертолетного винта, здесь затраты на выпрямление вектора тяги компенсируются использованием радиальной силы как таковой и отсутствием необходимости подавлять ее на внутренних секторах /в них она снимается флюгированием/.
В основных чертах механика циклоплана напоминает механику вертолета. Однако имеются принципиальные различия.
Как уже отмечалось, управление лопастями горизонтального циклоидного пропеллера, обеспечивающее создание ими требуемого вектора тяги, является как бы углублением функции автомата перекоса - на стороне сектора диска, соответствующего наступающим лопастям, они поворачиваются во флюгерное положение. Выйдя на противоположный сектор, соответствующий отступающим лопастям, они начинают плавно разворачиваться на рабочий угол атаки, становящийся максимальным приблизительно на трети движения по дуге, где кривизна вектора реакции проявляется минимально. На противоположной трети дуги лопасть начинает так же постепенно уменьшать угол атаки до флюгерного положения, принимаемого к диаметральной линии, за которой начинается нейтральный сектор. Процессом управляет автоматический механизм, срабатывающий по фиксированным контроллерным точкам на тарелке ротора.
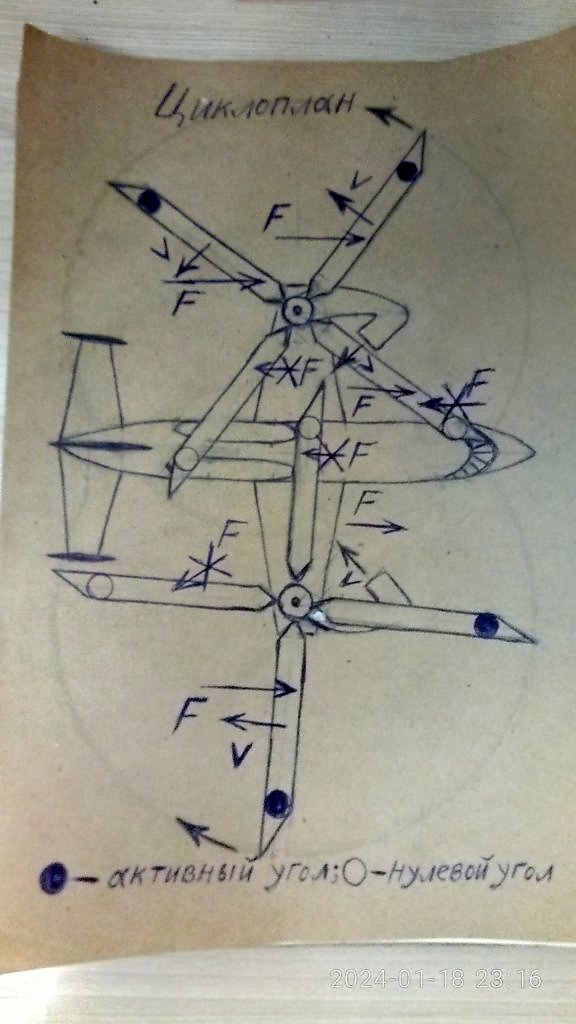
Лопасти на нейтральном секторе не создают как горизонтальной реакции, так и подьемной силы. Разумеется, что с одним ротором такой аппарат лететь не сможет из-за асимметрии. Естественный и наиболее понятный путь преодоления асимметрии - это установка с противоположной стороны аналогичного ротора. Для компактности роторы перекрываются внутренними секторами до предела возможности /в случае с наклоном дисков, подобно конструкции синхрокоптеров, это полные радиусы/. Такой конструкции способствует ограниченное число лопастей, обусловленное принципом действия горизонтального циклоидного пропеллера.
Безопасная работа такой системы обеспечивается жесткой синхронизацией вращения роторов, известной по механике синхрокоптеров. Для этого крутящий момент на роторы должен передаваться через синхронизирующий механизм с зубчатой передачей, не допускающей проскальзывания.
Поскольку разнос осей роторов получается сравнительно небольшим, более целесообразно размещение двигательной установки в/на/ фюзеляже, где будет находиться и главный редуктор, конструктивно совмещенный с синхронизирующим механизмом. Сравнительно небольшие обороты циклоидных пропеллеров позволяют использовать не газотурбинную установку, а более экономичный дизель.
Пропеллеры, образующие поперечную пару, устанавливаются либо на рамных пилонах, либо на специальном крыле. Последний вариант предпочтителен, так как позволит в скоростном полете создавать дополнительную подъёмную силу.
Целесообразно использовать крыло с удлинением, ограниченным точками установки колонок роторов - ввиду того, что над ними будут находиться секторы с неактивными лопастями и работе роторов оно препятствовать не будет. Во взаимодействии крыла с лопастями здесь, наоборот, возникает положительный момент, который при соответствующем конструктивном решении позволит увеличить общую подъёмную силу.
Для повышения эффективности системы можно направить между крылом и лопастями струю воздуха из компрессора.
Достоинством конструкции циклоплана можно считать возможность жесткой установки роторов, без наклоняющихся колонок. Управление подъёмной силой и боковым креном осуществляется дифференцированным изменением общего шага в паре пропеллеров. Путевое управление - дифференцированным изменением циклического шага в паре пропеллеров. Переход в режим висения и задание режима вертикального взлета осуществляется выводом из флюгирования лопастей на внутренних секторах роторов и работой всех лопастей под одним углом установки. Придание аппарату заднего хода осуществляется изменением функции и положения на противоположное обычному - лопасти на внешних секторах роторов переводятся во флюгирование, а на внутренних устанавливаются под рабочим углом.
Слабым местом оказывается управление по тангажу. В скоростном полете оно осуществляется традиционным задним крылом, служащим при изменении угла установки рулём высоты. Чтобы в статическом положении аппарат не оказался неуправляемым, можно применить искусственный обдув заднего крыла, используя специальные сопла, подающие на него воздух из компрессора /вместо нагнетания его в район центрального крыла, о чем здесь упоминалось - в положении висения, когда работают все лопасти, это будет не нужно/.
Возможно, более эффективным и реализуемым по имеющемуся опыту будет управление тангажём и креном путем наклона роторов,- несмотря на более сложную конструкцию, отменяющую одно из преимуществ циклоплана перед вертолетом. В таком случае при необходимости ходовая тяга может создаваться и наклоном роторов; при этом системный вариант тяги горизонтального циклоидного пропеллера тоже задействуется, что позволит достичь повышенного пропульсивного эффекта. Однако, чтобы совместить два этих способа, требуется придать лопастям нейтральных секторов некоторый угол атаки/положительный/, чтобы компенсировать наклон вниз, создающий отрицательную подъёмную силу.
Недостатком предложенной схемы циклоплана является одностороннее использование лопастных дисков, что, безусловно, отрицательно сказывается на общей эффективности. Для его компенсации возможен вариант со вторым ярусом роторов, взаимодействие которых организовано противоположным образом - лопасти внутренних секторов находятся в активном положении и создают тягу, а лопасти внешних секторов переводятся во флюгирование - при противоположном роторам первого яруса вращении.
РОТОРЫ С ТЯНУЩИМИ СЕГМЕНТАМИ ЛОПАСТЕЙ
Представленная система циклоплана обнаруживает ряд серьёзных недостатков.
Наиболее существенным оказывается нестабильность создаваемой такими роторами подъёмной силы: в процессе движения по окружности диска они значительно меняют угол установки, что сказывается не только на радиальной, но и коаксиальной составляющей их реакции. Идеальным был бы вариант включения горизонтальной реакции при стабильно действующей вертикальной.
В поле зрения попадает известное изобретение А.Флэттнера - снабжение лопасти отдельно устанавливающимся элементом, позволяющим изменять создаваемую ей реакцию в процессе движения по секторам (он предлагал это для замены автоматов перекоса). Этот принцип может быть использован и в другой, более жёсткой функции - включения мощной радиальной реакции на отступающих секторах.
Механизация лопасти в такой системе выглядит иначе, чем при управлении перекосом. Поднимающийся элемент должен находиться перед лопастью, так как для усиления радиальной реакции угол его атаки обращён вперёд по дуге её движения. При этом он будет иметь необычную для аэродинамических плоскостей форму - расширение от корня к концу, так как основная часть силы на нём возникает от периферии к концу, а установка этих элементов на втулке ротора не допускает большой ширины в корневой части.
Наиболее рациональным вариантом будет установка лопасти и "элерона" на одной оси, как бы разделяющей конструкцию на две части. В таком случае лопасть тоже должна иметь обратное сужение, иначе возникает дисбаланс действующих на конструкцию сил. Такая ось представляет собой двухконтурный стержень, связывающий "элерон" с контроллерным механизмом, а лопасть - со своей системой управления.
На разграничении систем создания подъёмной силы и горизонтальной тяги и основана "безболезненная" функция такого аппарата. Коренные лопасти у него работают как у обычного вертолёта - независимо от поднимающихся - опускающихся "элеронов". Работа последних на стабильности подъёмной силы почти не сказывается. При этом она в целом вписывается в традиционную схему перекоса - различения отступающих - требующих усиления реакции ,- и наступающих, - требующих её ослабления - секторов.
Нужно заметить, что элементы радиальной реакции, работающие только при отступающем движении, находятся в невыгодном положении - когда скоростной поток совпадает по направлению с их движением и не способствует напору на них. Зато им можно "безболезненно" придавать предельный угол атаки.
Особенность работы двухсегментных лопастей в предлагаемой схеме состоит в том, что сегменты должны работать независимо друг от друга, причём при плотном стыке разный угол установки будет мешать их полноценной аэродинамической функции. Для таковой требуется свободный проток воздуха вокруг лопасти, обеспечивающий его переток с засасывающей стороны на нагнетающую.
Проблема решается наличием продольной щели между сегментами, прерываемой лишь крепёжными элементами (собственно, наличие такового в центре длины лопастей делит её на две части). Такая щель обеспечит междусторонний проток воздуха на лопастях, хотя его характер и будет отличаться от такового в открытом пространстве. Прогон через щель даст ускорение потока, компенсируя недостаток проходящего воздушного объёма. Причём струйный характер потока создаст на несущем сегменте эффект Коанда, стимулируя его работу.
Кроме обеспечения подъёмной силой неактивных секторов, важным преимуществом двойной лопастной системы является предотвращение срыва потока на активных. Лопасть, угол установки которой "на пике" (в центре дуговой траектории) составляет 45 градусов и движение совпадает с путевым потоком, находится в крайне уязвимом положении. Наличие перед ней элемента с малым углом установки позволит сохранить нормальную аэродинамическую функцию системы. В целом действие вертикальной силы на лопастях ротора не будет отличаться от её действия на лопастях обычного вертолётного винта и даже будет иметь преимущество перед ним благодаря отсутствию наклона диска вперёд.
АВТОМАТ ПЕРЕОРИЕНТАЦИИ
Наиболее совершенной сделать систему циклоплана должно устройство, позволяющее предельно нагрузить отступающие лопасти при предельной разгрузке наступающих. Одновременно оно позволит снять угрозу срыва потока с отступающих лопастей, имеющих большой угол установки.
Наилучшим путём создания упора на лопасти будет наклон её плоскости вращения по ходу её движения. То есть нужно, чтобы лопасти отступающего сектора находились в наклонной плоскости вращения, а наступающего - в прямой. Единственный путь конструктивного решения этой задачи - разделение втулки, к которой крепятся лопасти, на два контура, один из которых будет прямым, а другой - наклонным. Контактный элемент, соединяющий лопасть со втулкой, соответственно смене секторов должен переставлять рабочий контакт с одного контура на другой. При этом внешне лопасти удерживаются внешним барабаном, объединяющим оба контура. Контактёры могут быть в нерабочем положении для обоих секторов, тогда лопасти удерживаются за хвостовики конструкцией внешнего барабана.
Контактёр представляет собой стойку, которая в нерабочем положении складывается, снимая с лопасти упор. Однако, если не предусматривать "холостого хода", стойка может не складываться, а просто перескакивать между контурами.
Механизм, управляющий углом установки лопастей, работает от механизма переориентации независимо. Его контактные элементы подходят к хвостовикам лопастей либо в полярном пространстве, перед обоими контурами втулок, либо между втулками внутреннего и внешнего контуров.
Отступающие лопасти, нагруженные радиальной реакцией, подключаются к втулке внешнего контура, имеющей вследствие большего диаметра больший крутящий момент.
Наклоненные назад лопасти отступающего сектора неизбежно создадут эффект реверсивной тяги. Потребуется её компенсация, наиболее эффективный способ которой - наклон лопастей противоположного, наступающего, сектора в противоположную сторону - вперёд. Такое решение "попутно" даст и то преимущество, что тормозящая реакция наступающих лопастей будет компенсироваться тягой полудиска, наклоненного вперёд подобно вертолётному винту. В таком случае лопасти на нём могут иметь эффективный угол установки, позволяющий полноценно создавать подъёмную силу (благодаря тому, что тормозящая реакция компенсируется).
Втулки внутреннего и внешнего контуров целесообразно сделать наклоняющимися во все стороны от прямой вертикальной оси, допуская различные варианты взаимоотношения между контурами, в том числе противоположный основному. В режиме висения они остаются в стандартном положении компенсации, но при этом лопастям обоих секторов придаётся равный угол установки. Такая конфигурация позволит использовать даваемый наклоном дополнительный упор для увеличения подъёмной силы. Однако в режиме экономии мощности оба сектора могут устанавливаться в прямое положение (при противоположном наклоне секторов некоторая мощность теряется на взаимную компенсацию создаваемой ими "дисковой" тяги. Прямое положение обоих секторов может применяться и для полёта в экономичном режиме, когда не требуется чрезвычайная пропульсивная сила.
Наклоняющиеся втулки решат и проблему тангажного управления без введения в систему дополнительных элементов. Может использоваться как общий, так и дифференцированный наклон дисковых секторов. Для управления бортовым креном, например, можно наклонять только внешние секторы при прямом положении внутренних (последние на эту функцию мало влияют). Для управления килевым тангажём можно наклонять в противоположные стороны передние и задние секторы обоих роторов. Функцию ходовой тяги лопасти сохраняют во всех этих положениях.
только на горизонтальную тягу, поглощаемую главным образом их работой. Эту систему нельзя назвать вполне рациональной с конструктивной точки зрения ввиду наличия элементов, специально предназначенных только для создания подьемной силы (при том, что еще требуется специальный механизм привода,
подключаемого к ним при взлете/.
Вертолет имеет почти исключительно вредной силой так называемый реактивный момент - радиальную составляющую создаваемой лопастями силы, приводящую к вращению корпуса. На преодоление этого вредного эффекта во всех системах, кроме реактивного привода, затрачивается
дополнительная мощность, а в самой распространенной классической схеме еще и требуется специальный элемент - рулевой винт, фенестерон или реактивное сопло. Все это добавляет нерациональности данной системе.
Однако реактивный момент обнаруживает ряд полезных проявлений, нашедших применение при эксплуатации вертолетов. Симметричный боковой отброс воздуха радиальными потоками стабилизирует аппарат при двухвинтовой поперечной схеме. А в классической и продольной двухвинтовой изменение степени компенсации реактивного момента обеспечивает эффективное управление /возможен разворот на месте/ без наклона винтов.
Сама сила реактивного момента - на тяжелых вертолетах до нескольких тонн - сопоставима с тягой, требуемой для горизонтального движения. Разумеется, создать ей таковое не получается из-за ее циклической направленности.
У вертолета имеется устройство управления циклическим шагом, позволяющим координировать и дифференцировать создаваемую лопастями реакцию. Изменение циклического шага исплльзуется для путевого управления.
Если радиальную силу оставить действовать с одной стороны килевой линии, а с другой ее каким-то образом снять, то она будет действовать направленно - создаст линейно действующую пропульсивную силу/!/. Не забудем про возможность управления лопастями: чтобы лопасть вообще не создавала радиальной реакции, она должна быть поставлена в положение горизонтального флюгера - под нулевым углом атаки. Повернувшись на другую сторону диска, она восстановит рабочий угол атаки и создаст требуемую реакцию.
Созданная тяга в действительности будет направлена не прямо по килю, а по дуге, соответствующей траектории движения лопасти. Но коррекция направления - что называется, дело техники: рулевым устройством дуговому движению можно поставить заслон, и оно развернется в линейное. Линейное движение можно получить и из двух дуговых, действующих с противоположных сторон - тогда два параллельно расположенных ротора должны будут флюгировать лопасти на внутренних секторах и возвращать в рабочее положение на внешних.
Для управления описанным процессом может быть применено устройство, напоминающее автомат перекоса, но срабатывающее фиксировано по участкам движения лопастей.
Предложенный вариант ротора является по сути дела циклоидным пропеллером в горизонтальном варианте, представляющимся нам более целесообразным, чем уже известный и имеющий прецеденты реализации вертикальный /аппарат называется циклокоптером/. Горизонтальный вариант нам представляется более надежным и безопасным, и более удобным в применении: конструкция аппарата аналогична конструкции вертолета.
Лопасть горизонтального циклоидного пропеллера отличается от лопасти вертолетного винта, хотя и имеет понятное с ней сходство. Как и у вертолета, у циклоплана подъёмная сила создается непосредственной реакцией на лопастях по принципу крыльевой системы - разрежением воздуха на внешней стороне и уплотнением на внутренней. Но, в отличие от лопасти вертолетного винта, лопасть циклоплана ориентирована на создание как можно большей радиальной реакции, которая у вертолета расценивается как реактивный момент и для создания положительной движущей силы не используется.
Следующее принципиальное отличие горизонтального циклоидного пропеллера от вертолетного винта - это отсутствие эффекта цельного диска.- когда за счет вязкости воздуха отдельные лопасти сливаются в единую несущую плоскость. Если у циклоидного пропеллера реакция лопастей сольется в единую, то радиальные моменты потеряют свою выделенность и пропульсивная сила ими создаваться не будет/точнее сказать, будет с низкой эффективностью/. Поэтому число лопастей горизонтального циклоидного пропеллера ограничено прямым углом их взаимоположения на диске, обеспечивающим свободное расхождение создаваемых потоков;то есть предельное число лопастей ротора такой системы - 4.
Ширина лопастей ротора при фиксированном диаметре, то есть из ограниченной длине, может варьироваться, что известно по вертолетным винтам. У последних лопасти характеризуются малой относительной шириной/L/H~20/, что соответствует минимальному реактивному моменту и наилучшей управляемости лопасти. Увеличение ширины лопастей приводит как к усилению реактивного момента, так и увеличению подьемной силы;при этом затрудняется управление. У горизонтального циклоидного пропеллера важны в равной степени как подьемная сила, так и реактивный момент. Проблема управляемости преодолевается отличным от вертолетного характером движения лопасти по секторам: во внутренних они флюгируются, создавая своего рода аэродинамический вакуум, и принимают большой угол атаки на внешних. Рулевое устройство /или взаимоположение роторов/ должно обеспечивать симметрию возникающих при этом импульсов.
Итак, ротор циклоплана отличается от вертолетного большой шириной лопастей и ограниченным их числом. Являясь, кроме элемента создания подъемной силы, еще и пропульсивным движителем, в функции последнего он использует радиальную реакцию лопастей, аналогичную реактивному моменту у вертолета.
Чтобы радиальный момент имел уровень силы, достаточный для создания требуемой горизонтальной тяги, лопасти должны иметь ширину в 2, а то и в 3 раза больше, чем у вертолетных. Также их специфическая функция в горизонтальном циклоидном пропеллере требует большего угла установки, предел которого будет составлять 45 градусов /при большем угле увеличилась бы радиальная реакция, но до неприемлемого уровня снизилась бы подьемная сила/. Относительная длина лопасти скорее всего не будет превышать 10H,- угроза срыва потока преодолевается прямым положением ротора относительно горизонта /в отличие от накдоненного вперед вертолетного винта/. В плане несущей площади малое число лопастей компенсируется их большой шириной.
Оптимальная форма лопасти горизонтального циклоидного пропеллера - прямоугольная со скошенной концевой частью, - позволяет сохранить максимальную площадь при преодолении завихрений, создаваемых прямыми углами при вращении лопасти /неслучайно такая форма напоминает крыло птицы/.
Подъемная сила/вертикальная тяга/ для циклоидного пропеллера рассчитывается по теории скоростного напора для одной изолированной лопасти, так как их обьединяющее взаимодействие в нем исключено. Коэффициент эффективности при максимальном угле установки принимаем равным 1,5. Скорость движения лопасти, предназначенной специально для создания радиальной реакции, несколько ниже, чем в вертикальном роторе - ограничена значением в 200 м/с. Поскольку расчет делается для одной лопасти, значение Fn в формуле будет равно 1. Итак, 1,5*1кг/м3*0,5v2/2×Fn.Полученная по этой формуле величина, умноженная на число активных лопастей ротора, определяет только подьемную силу, так как радиальная реакция как раз вычитается из нее, предназначенной для обычного винта с вредным реактивным моментом.
В принципе плоскость, обращенная под углом в 45 градусов к горизонту, делит пополам направленную вниз /коаксиальную/ и радиальную /направленную горизонтально по кругу/ реакцию. Однако находящаяся над ротором воздушная масса непосредственно движется на него коаксиально, а радиальный момент ограничен угловым пространством диска. Поэтому горизонтальная тяга лопасти в такой системе рассчитывается по формуле реактивного момента для вертолетного винта с вводом соответствующих параметров горизонтального циклоидного пропеллера.
И все же с учетом того, что бОльшая часть реакции лопастей идет на создание подьемной силы, ЭФФЕКТИВНОСТЬ ГОРИЗОНТАЛЛЬНОГО ЦИКЛОИДНОГО ПРОПЕЛЛЕРА БУДЕТ ВыШЕ ЭФФЕКТИВНОСТИ ВЕРТОЛЕТНОГО ВИНТА: сила, вычитаемая как вредная из общей реакции последнего, здесь работает как полезная.
Может показаться, что широкая и под большим углом поднятая лопасть создаст сильное лобовое сопротивление. В действительности это не так: создающая радиальную реакцию лопасть горизонтального циклоидного пропеллера аэродинамически аналогична машущему крылу, у которого индуктивное сопротивление равно создаваемой тяге. В этом еще один момент преимущества перед наклоненным диском вертолетного винта, у которого силы тяги и индуктивного сопротивления /к которому добавляется еще волновое/ находятся в диспропорциональных отношениях. Работа лопастей циклоидного пропеллера не требует высокой скорости их движения /сравнима со скоростью полета аппарата/ и до волнового сопротивления их аэродинамика не доходит. Естественный характер обтекания этих элементов связан еще и с тем, что траектория их движения параллельна линии движения аппарата /диск циклоидного пропеллера для создания тяги не требует наклона/. А главный момент уменьшения сопротивления по сравнению с вертолетным винтом - отсутствие наступающих лопастей: здесь лопасти на обратном секторе находятся в положении горизонтального флюгера и реакции не создают.
С этим связан, конечно, и недостаток такой системы - работает только один сектор диска. Однако в скоростном полете деактивированные лопасти могут выполнять роль несущей поверхности, подобной жесткому крылу. При этом в положении висения будут работать одновременно все лопасти ротора, компенсируя недостающую динамическую поддержку /у вертолета такой компенсации нет, почему статический потолок значительно меньше динамического/.
Момент снижения КПД у описанного движителя создается кривизной вектора действия радиальной силы в активном секторе, обусловленной круговым характером движения лопасти, образующим в области используемой реакции полукруг - дуговую траекторию. На выпрямление действия движителя - подавление бокового коэффициента - при любом способе затрачивается некоторая энергия. Но, опять же ли, в отличие от вертолетного винта, здесь затраты на выпрямление вектора тяги компенсируются использованием радиальной силы как таковой и отсутствием необходимости подавлять ее на внутренних секторах /в них она снимается флюгированием/.
В основных чертах механика циклоплана напоминает механику вертолета. Однако имеются принципиальные различия.
Как уже отмечалось, управление лопастями горизонтального циклоидного пропеллера, обеспечивающее создание ими требуемого вектора тяги, является как бы углублением функции автомата перекоса - на стороне сектора диска, соответствующего наступающим лопастям, они поворачиваются во флюгерное положение. Выйдя на противоположный сектор, соответствующий отступающим лопастям, они начинают плавно разворачиваться на рабочий угол атаки, становящийся максимальным приблизительно на трети движения по дуге, где кривизна вектора реакции проявляется минимально. На противоположной трети дуги лопасть начинает так же постепенно уменьшать угол атаки до флюгерного положения, принимаемого к диаметральной линии, за которой начинается нейтральный сектор. Процессом управляет автоматический механизм, срабатывающий по фиксированным контроллерным точкам на тарелке ротора.
Лопасти на нейтральном секторе не создают как горизонтальной реакции, так и подьемной силы. Разумеется, что с одним ротором такой аппарат лететь не сможет из-за асимметрии. Естественный и наиболее понятный путь преодоления асимметрии - это установка с противоположной стороны аналогичного ротора. Для компактности роторы перекрываются внутренними секторами до предела возможности /в случае с наклоном дисков, подобно конструкции синхрокоптеров, это полные радиусы/. Такой конструкции способствует ограниченное число лопастей, обусловленное принципом действия горизонтального циклоидного пропеллера.
Безопасная работа такой системы обеспечивается жесткой синхронизацией вращения роторов, известной по механике синхрокоптеров. Для этого крутящий момент на роторы должен передаваться через синхронизирующий механизм с зубчатой передачей, не допускающей проскальзывания.
Поскольку разнос осей роторов получается сравнительно небольшим, более целесообразно размещение двигательной установки в/на/ фюзеляже, где будет находиться и главный редуктор, конструктивно совмещенный с синхронизирующим механизмом. Сравнительно небольшие обороты циклоидных пропеллеров позволяют использовать не газотурбинную установку, а более экономичный дизель.
Пропеллеры, образующие поперечную пару, устанавливаются либо на рамных пилонах, либо на специальном крыле. Последний вариант предпочтителен, так как позволит в скоростном полете создавать дополнительную подъёмную силу.
Целесообразно использовать крыло с удлинением, ограниченным точками установки колонок роторов - ввиду того, что над ними будут находиться секторы с неактивными лопастями и работе роторов оно препятствовать не будет. Во взаимодействии крыла с лопастями здесь, наоборот, возникает положительный момент, который при соответствующем конструктивном решении позволит увеличить общую подъёмную силу.
Для повышения эффективности системы можно направить между крылом и лопастями струю воздуха из компрессора.
Достоинством конструкции циклоплана можно считать возможность жесткой установки роторов, без наклоняющихся колонок. Управление подъёмной силой и боковым креном осуществляется дифференцированным изменением общего шага в паре пропеллеров. Путевое управление - дифференцированным изменением циклического шага в паре пропеллеров. Переход в режим висения и задание режима вертикального взлета осуществляется выводом из флюгирования лопастей на внутренних секторах роторов и работой всех лопастей под одним углом установки. Придание аппарату заднего хода осуществляется изменением функции и положения на противоположное обычному - лопасти на внешних секторах роторов переводятся во флюгирование, а на внутренних устанавливаются под рабочим углом.
Слабым местом оказывается управление по тангажу. В скоростном полете оно осуществляется традиционным задним крылом, служащим при изменении угла установки рулём высоты. Чтобы в статическом положении аппарат не оказался неуправляемым, можно применить искусственный обдув заднего крыла, используя специальные сопла, подающие на него воздух из компрессора /вместо нагнетания его в район центрального крыла, о чем здесь упоминалось - в положении висения, когда работают все лопасти, это будет не нужно/.
Возможно, более эффективным и реализуемым по имеющемуся опыту будет управление тангажём и креном путем наклона роторов,- несмотря на более сложную конструкцию, отменяющую одно из преимуществ циклоплана перед вертолетом. В таком случае при необходимости ходовая тяга может создаваться и наклоном роторов; при этом системный вариант тяги горизонтального циклоидного пропеллера тоже задействуется, что позволит достичь повышенного пропульсивного эффекта. Однако, чтобы совместить два этих способа, требуется придать лопастям нейтральных секторов некоторый угол атаки/положительный/, чтобы компенсировать наклон вниз, создающий отрицательную подъёмную силу.
Недостатком предложенной схемы циклоплана является одностороннее использование лопастных дисков, что, безусловно, отрицательно сказывается на общей эффективности. Для его компенсации возможен вариант со вторым ярусом роторов, взаимодействие которых организовано противоположным образом - лопасти внутренних секторов находятся в активном положении и создают тягу, а лопасти внешних секторов переводятся во флюгирование - при противоположном роторам первого яруса вращении.
РОТОРЫ С ТЯНУЩИМИ СЕГМЕНТАМИ ЛОПАСТЕЙ
Представленная система циклоплана обнаруживает ряд серьёзных недостатков.
Наиболее существенным оказывается нестабильность создаваемой такими роторами подъёмной силы: в процессе движения по окружности диска они значительно меняют угол установки, что сказывается не только на радиальной, но и коаксиальной составляющей их реакции. Идеальным был бы вариант включения горизонтальной реакции при стабильно действующей вертикальной.
В поле зрения попадает известное изобретение А.Флэттнера - снабжение лопасти отдельно устанавливающимся элементом, позволяющим изменять создаваемую ей реакцию в процессе движения по секторам (он предлагал это для замены автоматов перекоса). Этот принцип может быть использован и в другой, более жёсткой функции - включения мощной радиальной реакции на отступающих секторах.
Механизация лопасти в такой системе выглядит иначе, чем при управлении перекосом. Поднимающийся элемент должен находиться перед лопастью, так как для усиления радиальной реакции угол его атаки обращён вперёд по дуге её движения. При этом он будет иметь необычную для аэродинамических плоскостей форму - расширение от корня к концу, так как основная часть силы на нём возникает от периферии к концу, а установка этих элементов на втулке ротора не допускает большой ширины в корневой части.
Наиболее рациональным вариантом будет установка лопасти и "элерона" на одной оси, как бы разделяющей конструкцию на две части. В таком случае лопасть тоже должна иметь обратное сужение, иначе возникает дисбаланс действующих на конструкцию сил. Такая ось представляет собой двухконтурный стержень, связывающий "элерон" с контроллерным механизмом, а лопасть - со своей системой управления.
На разграничении систем создания подъёмной силы и горизонтальной тяги и основана "безболезненная" функция такого аппарата. Коренные лопасти у него работают как у обычного вертолёта - независимо от поднимающихся - опускающихся "элеронов". Работа последних на стабильности подъёмной силы почти не сказывается. При этом она в целом вписывается в традиционную схему перекоса - различения отступающих - требующих усиления реакции ,- и наступающих, - требующих её ослабления - секторов.
Нужно заметить, что элементы радиальной реакции, работающие только при отступающем движении, находятся в невыгодном положении - когда скоростной поток совпадает по направлению с их движением и не способствует напору на них. Зато им можно "безболезненно" придавать предельный угол атаки.
Особенность работы двухсегментных лопастей в предлагаемой схеме состоит в том, что сегменты должны работать независимо друг от друга, причём при плотном стыке разный угол установки будет мешать их полноценной аэродинамической функции. Для таковой требуется свободный проток воздуха вокруг лопасти, обеспечивающий его переток с засасывающей стороны на нагнетающую.
Проблема решается наличием продольной щели между сегментами, прерываемой лишь крепёжными элементами (собственно, наличие такового в центре длины лопастей делит её на две части). Такая щель обеспечит междусторонний проток воздуха на лопастях, хотя его характер и будет отличаться от такового в открытом пространстве. Прогон через щель даст ускорение потока, компенсируя недостаток проходящего воздушного объёма. Причём струйный характер потока создаст на несущем сегменте эффект Коанда, стимулируя его работу.
Кроме обеспечения подъёмной силой неактивных секторов, важным преимуществом двойной лопастной системы является предотвращение срыва потока на активных. Лопасть, угол установки которой "на пике" (в центре дуговой траектории) составляет 45 градусов и движение совпадает с путевым потоком, находится в крайне уязвимом положении. Наличие перед ней элемента с малым углом установки позволит сохранить нормальную аэродинамическую функцию системы. В целом действие вертикальной силы на лопастях ротора не будет отличаться от её действия на лопастях обычного вертолётного винта и даже будет иметь преимущество перед ним благодаря отсутствию наклона диска вперёд.
АВТОМАТ ПЕРЕОРИЕНТАЦИИ
Наиболее совершенной сделать систему циклоплана должно устройство, позволяющее предельно нагрузить отступающие лопасти при предельной разгрузке наступающих. Одновременно оно позволит снять угрозу срыва потока с отступающих лопастей, имеющих большой угол установки.
Наилучшим путём создания упора на лопасти будет наклон её плоскости вращения по ходу её движения. То есть нужно, чтобы лопасти отступающего сектора находились в наклонной плоскости вращения, а наступающего - в прямой. Единственный путь конструктивного решения этой задачи - разделение втулки, к которой крепятся лопасти, на два контура, один из которых будет прямым, а другой - наклонным. Контактный элемент, соединяющий лопасть со втулкой, соответственно смене секторов должен переставлять рабочий контакт с одного контура на другой. При этом внешне лопасти удерживаются внешним барабаном, объединяющим оба контура. Контактёры могут быть в нерабочем положении для обоих секторов, тогда лопасти удерживаются за хвостовики конструкцией внешнего барабана.
Контактёр представляет собой стойку, которая в нерабочем положении складывается, снимая с лопасти упор. Однако, если не предусматривать "холостого хода", стойка может не складываться, а просто перескакивать между контурами.
Механизм, управляющий углом установки лопастей, работает от механизма переориентации независимо. Его контактные элементы подходят к хвостовикам лопастей либо в полярном пространстве, перед обоими контурами втулок, либо между втулками внутреннего и внешнего контуров.
Отступающие лопасти, нагруженные радиальной реакцией, подключаются к втулке внешнего контура, имеющей вследствие большего диаметра больший крутящий момент.
Наклоненные назад лопасти отступающего сектора неизбежно создадут эффект реверсивной тяги. Потребуется её компенсация, наиболее эффективный способ которой - наклон лопастей противоположного, наступающего, сектора в противоположную сторону - вперёд. Такое решение "попутно" даст и то преимущество, что тормозящая реакция наступающих лопастей будет компенсироваться тягой полудиска, наклоненного вперёд подобно вертолётному винту. В таком случае лопасти на нём могут иметь эффективный угол установки, позволяющий полноценно создавать подъёмную силу (благодаря тому, что тормозящая реакция компенсируется).
Втулки внутреннего и внешнего контуров целесообразно сделать наклоняющимися во все стороны от прямой вертикальной оси, допуская различные варианты взаимоотношения между контурами, в том числе противоположный основному. В режиме висения они остаются в стандартном положении компенсации, но при этом лопастям обоих секторов придаётся равный угол установки. Такая конфигурация позволит использовать даваемый наклоном дополнительный упор для увеличения подъёмной силы. Однако в режиме экономии мощности оба сектора могут устанавливаться в прямое положение (при противоположном наклоне секторов некоторая мощность теряется на взаимную компенсацию создаваемой ими "дисковой" тяги. Прямое положение обоих секторов может применяться и для полёта в экономичном режиме, когда не требуется чрезвычайная пропульсивная сила.
Наклоняющиеся втулки решат и проблему тангажного управления без введения в систему дополнительных элементов. Может использоваться как общий, так и дифференцированный наклон дисковых секторов. Для управления бортовым креном, например, можно наклонять только внешние секторы при прямом положении внутренних (последние на эту функцию мало влияют). Для управления килевым тангажём можно наклонять в противоположные стороны передние и задние секторы обоих роторов. Функцию ходовой тяги лопасти сохраняют во всех этих положениях.

Голосование:
Суммарный балл: 0
Проголосовало пользователей: 0
Балл суточного голосования: 0
Проголосовало пользователей: 0
Проголосовало пользователей: 0
Балл суточного голосования: 0
Проголосовало пользователей: 0
Голосовать могут только зарегистрированные пользователи
Вас также могут заинтересовать работы:




Отзывы:
Нет отзывов
Оставлять отзывы могут только зарегистрированные пользователи
Трибуна сайта

Наш рупор

